
Control Systems
Control Systems
Control Systems


Research: Fault-tolerant control

Research: Aerospace applications
Research: Aerospace applications

Research: Fault-tolerant control
The Control Systems Research group at Exeter University has renowned expertise in the development of novel practical control systems with particular interest in their application to aerospace systems. We have participated in wide range of projects ranging from fundamental research through to implementation, sponsored by different funding agencies and industry (EPSRC, EU, ESA and Innovate UK). Areas of particular interest include:
- Fault detection and condition monitoring
- Fault-tolerant control
- Unmaned Air Vehicles
- Sliding Mode Control
- Multi-agent networks
- Tuning and validation of complex control systems
View our publications >>
Find out about our research projects >>
Research areas
A strand of work pioneered by the group has explored the use of sliding mode observers for Fault Detection and Isolation. The novelty of this approach lies in the ability of sliding mode observers to reconstruct un-measurable signals in the process being monitored by appropriate scaling and filtering of the so-called 'equivalent output error injection'. (This represents the average value the nonlinear term in the observer has to take in order to maintain a sliding motion). This is a unique property of sliding mode observers, and emanates from the fact that the introduction of a sliding motion forces the outputs of the observer to exactly track the plant measurements. This estimation approach is quite different from typical residual generation methods for fault detection in which the residual signals are dynamic weightings of the fault signals. Reconstruction approaches attempt to capture both the magnitude and 'shape' of the faults, and as a result both detection and isolation are handled simultaneously to some extent. Furthermore, the fact that the faults are reconstructed, allows the possibility of using the reconstructions to compensate for the fault effects - for instance by directly 'correcting' the output of a faulty sensor. These ideas have been investigated for fault detection (and fault-tolerant control) of a civil aircraft within the context of the GARTEUR Action Group on Fault Tolerant Control FM-AG16 and the EU FP7-funded ADDSAFE project.
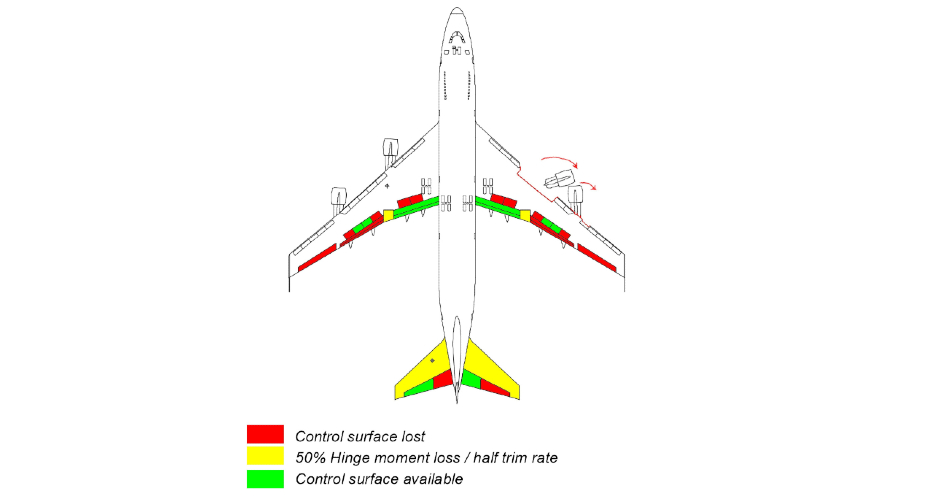
In addition to using sliding mode observers for fault detection and isolation, the well-known robustness properties of sliding mode control can be exploited to achieve fault-tolerant control with respect to actuator faults. These robustness properties make sliding mode schemes attractive for applications in the area of aircraft flight control. Recent work has considered sliding mode control in the context of 'control allocation'. In this situation the total control effort is distributed between a set of similar actuators (which constitutes redundancy within the system). The novelty of this work is that the control allocation scheme automatically redistributes the control signal, based on estimates of the effectiveness level of the actuators, which are obtained using sliding mode observers. These ideas have been applied and tested on the El-Al Flight 1862 crash scenario and implemented on the SIMONA flight simulator as part of GARTEUR FM-AG16.

An important engineering application area for theoretical developments in fault detection and fault-tolerant control is aerospace systems. As part of GARTEUR FM-AG16 the sliding mode controllers and observers developed were implement on the six-degree-of freedom motion flight simulator called SIMONA at Delft University of Technology and were evaluated by civilian test pilots. As part of the final open workshop, the sliding mode controllers were 'flown' by KLM pilots, and demonstrated live to the public and industrial representatives. The EU FP7-funded project 'ADDSAFE: Advanced Fault Diagnosis for Safer Flight Guidance and Control' built on the ideas from the GARTEUR AG16 project and sought to undertake a full-scale industrial assessment of the fault detection schemes developed in the project through to implementation on the 'Iron'-Bird' facility in Airbus Toulouse. (The Iron-Bird implementation is the final test in the industrial development cycle of any new system for Airbus aircraft prior to actual flight testing, and represents the most rigorous validation of the FDI scheme possible).
Another application area where these ideas have begun to be exploited is spacecraft/satellite systems. In such an environment where deployment is expensive and high risk, once in orbit, if a fault occurs there is no recourse since it is usually prohibitively expense to undertake a satellite 'capture' and repair mission. Satellite autonomy therefore invariably requires Fault Detection and Isolation (FDI) schemes to detect malfunctions and ideally introduce a fault-tolerant capability. Work funded by the European Space Agency called SATFDI in conjunction with DEIMOS-Space Systems (Spain) and Astrium (France) investigated the application of sliding mode observers for fault detection in a satellite demonstrator project. The object was to demonstrate increased Technology Readiness Levels for sliding mode observers in space applications.
Unmanned Air Vehicles (UAVs) represent another type of aerospace platform requiring fault-tolerant characteristics - motivated more because of the level of autonomy they are required to operate at, rather than from a safety perspective. Often these vehicles tend to be built from cheap, commercial-off-the-shelf (COTS) components, and the challenge is to create reliable systems from less reliable components. These systems provide relatively inexpensive and safe implementation platforms to test state-of-the-art FTC scheme. Another driver for significantly increased levels of fault tolerance for UAVs comes from the recent European initiative SESAR, which aims to integrate unmanned air vehicles with civilian traffic over European airspace as part of an effort to modernise the European air traffic management system. As a consequence, higher levels of reliability for the UAVs are necessary because these vehicles cannot rely on humans-in-the-loop to recover from 'upset' conditions and are not able to benefit from the skills of highly trained pilots to cope with emergency situations.

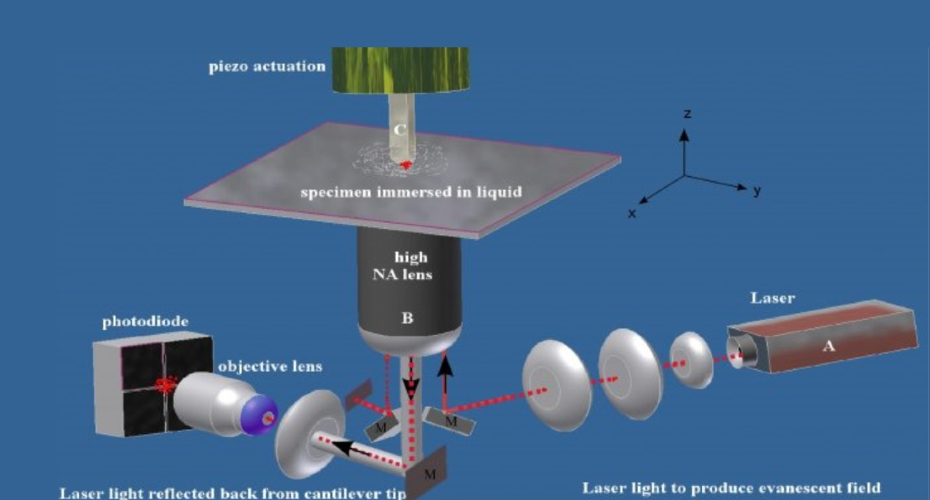
A collaboration with the Centre for Nano-science and Quantum Information at Bristol University aims to develop nano-precision positioning devices for atomic force microscopes. This is seen as an emerging application area in the control systems community. In this project, sliding mode observers will be used as 'disturbance observers' to integrate within the control loops to improve accuracy and to allow faster scanning rates. Based on measurements of the oscillating cantilever tip, observers will also provide information which is unmeasurable, but which is fundamental to improving the estimate of the surface topography of the specimen under study. The objective is to create a non-contact transverse dynamic atomic force microscope, capable of observing biological processes in-situ and at high speed.
This approach forces the closed-loop system trajectories to evolve along a surface in the state-space by means of discontinuous control strategy. The closed-loop system performance is specified by appropriate surface selection, and robustness is ensured via a control law which forces the states to remain on the surface. Theoretically, sliding mode controllers are able to completely reject the effect of a class of uncertainties known as 'matched uncertainties'. This robustness has stimulated research in this area for over two decades. Historically, the theoretical development of sliding mode control ideas took place under the assumption that all the states of the system were available for use in the control law. From an engineering perspective, however, this assumption is untenable and the development of sliding mode theory for the situation where only measurement information is available has been an underpinning theme of our research work for the last decade.
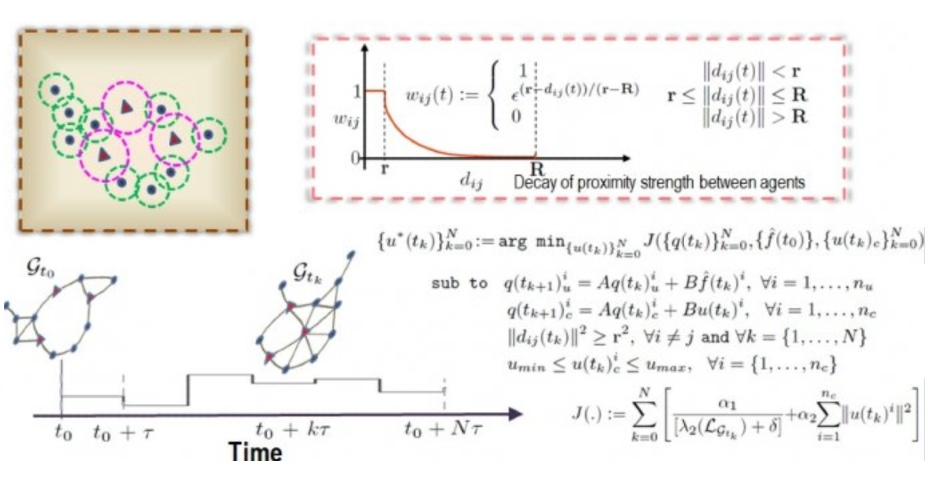
This is a topical area within the field of control systems, importantly, many of the control and estimation problems which are currently emerging from technological advancements in other fields of science ranging from studies of internet protocols, cellular phone networks, biological networks, cooperative and coordinated control of multiple agents and energy distribution networks, require understanding of this class of systems and the development of distributed controllers and estimators.
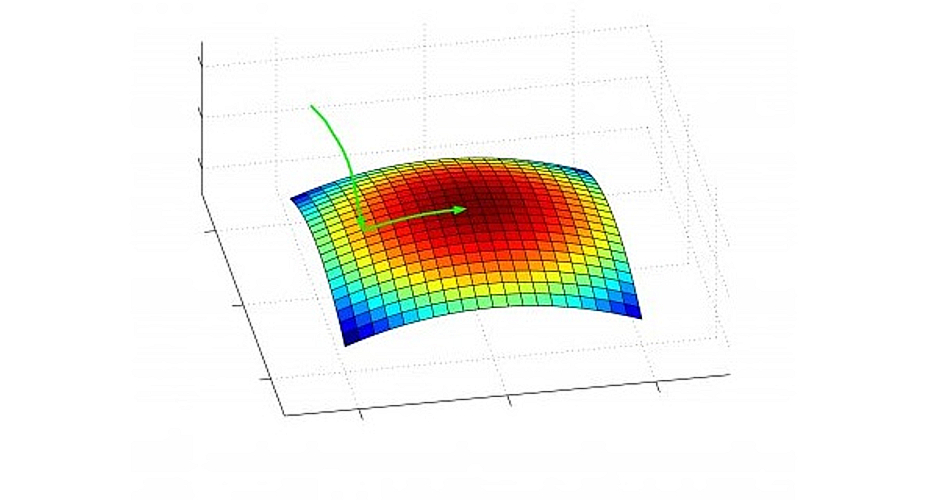
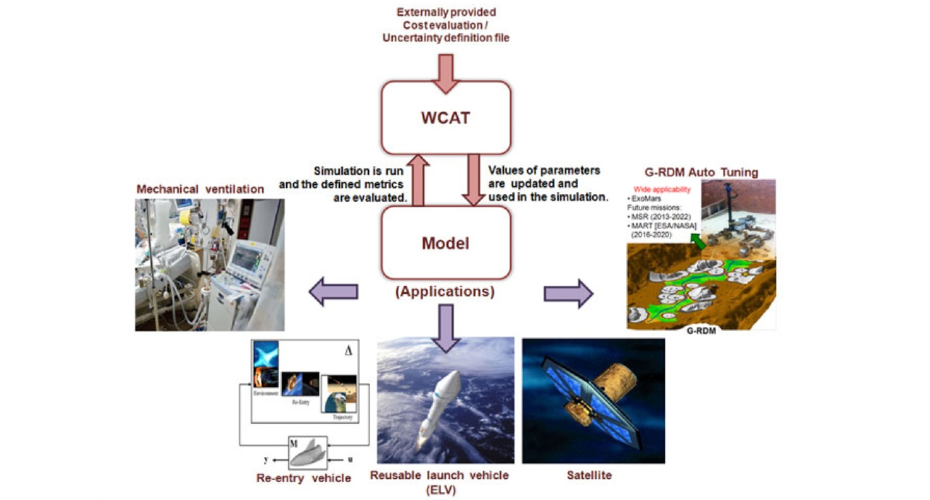
In recent years, we have been developing specialised simulation- and optimisation-based analysis tools for tuning and validation of complex control systems. It is well known that the vast majority of the budget for any prototype design is spent in this activity. We are particularly interested in assessing the robust performance of complex realistic, industrial-standard controllers for different prototypes, mainly in the area of aerospace applications, with large numbers of uncertainties, either epistemic or aleoteric, associated with the representative model. It is imperative for the clearance of a design, to have certain identified variables - normally the control signals and variables associated with system safety in the presence of hundreds of uncertain parameters - respect certain a-priori defined limits all the time to ensure the satisfactory safe operation and thus success of the mission.
At Exeter, we develop analysis tools (Worst Case Analysis Tools: WCAT - II) to address this crucial problem, which relies on a suite of single- and multi-objective optimisation algorithms and polynomial chaos surrogate modelling. The applications/missions that we have been investigating include flight control, attitude control of satellites (for Earth observation), control laws for the European reusable launch vehicle (RLV), integrated guidance, navigation and control (GNC) of autonomous rendezvous in Mars Sample Return (MSR), and GNC of Entry, Descent and Landing Systems (EAGLE). To respect and protect the legacy controllers and models from industry, the proposed tools treat them as 'black-box' with access limited to certain input and output variables.
We are also interested in tuning the legacy controllers of a mission efficiently to suit a related but different mission, such that multiple desired objects are robustly met, and the solution is obtained in a cost-effective manner.
People
Academic staff
- Dr Halim Alwi - Senior Lecturer
- Professor Christopher Edwards - Professor in Control Engineering
- Professor Prathyush P Menon - Associate Professor
- Dr. Guido Herrman (University of Bristol)
- Prof. Mervyn Miles (University of Bristol)
- Dr Andres Marcos (University of Bristol)
- Prof. Debasish Ghose (IISc Bangalore, India)
- Dr. Alexandre Seuret (CNRS, Toulose, France)
- Prof. Dr. Ir. J.A. (Bob) Mulder (Delft University of Technology)
- Ir. Olaf Stroosma (Delft University of Technology)
- Prof. Yuri Shtessel (University of Alabama, Huntsville, Al, USA)
- Dr Argyris Zolotas (University of Sussex)
- Dr. Ir. Thomas Lombaerts (DLR, Oberpfaffenhofen, Germany)
- Ir. Hafid Smaili (NLR, Netherlands)